


こんにちは。くろお測量登記・不動産鑑定事務所の黒尾です。
上空に障害物がある場合の離着陸(マニュアル+自動航行の併用)についてご紹介させて頂きたいと思いいます。
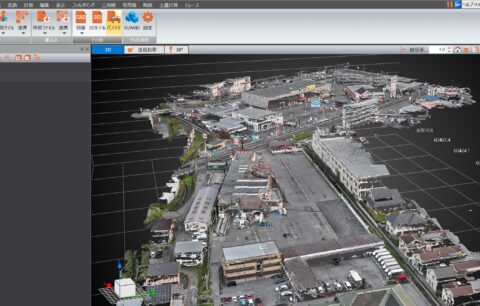
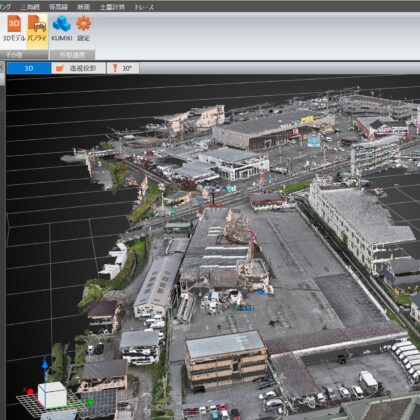
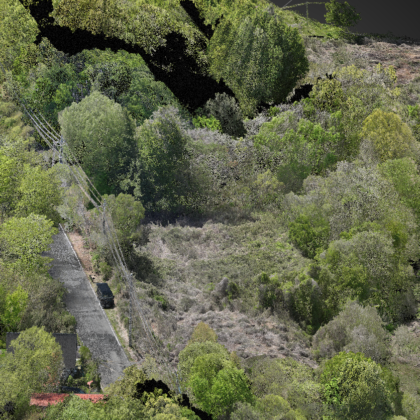
現場によっては、離着陸ポイント上空に 木の枝・電線が多数交差する非常に狭い空域 である場合があるかと思います。 この場合、通常使用する全自動モードように「開けた場所にホームポイントを設定 → 地上から自動航行→LTH」という一般的な飛行方法は使用できません。
現場の状況例

- 市道・路肩上空に木の枝・電線が多数
- ホームポイント直上に安全に上昇できない
- 自動航行のみでは離陸・着陸が不可能
- マニュアル飛行で障害物を避けながら上空へ出る必要がある
マニュアル飛行と自動航行を組み合わせた飛行方法
障害物を避けるため、マニュアル飛行で安全な上空へ出た後、自動航行に切り替える方式を採用する必要があります。
飛行手順
- 路肩からマニュアル飛行で離陸し、木の間を通過して開けた上空へ移動
- 上空でミッションデータをアップロード
- アップロード後、ドローンが自動でスタート地点へ移動し、自動航行が開始
- ミッション終了後、再びマニュアル飛行で障害物を避けながら着陸地点へ誘導
注意点(安全確保と操縦技術)
マニュアル飛行で障害物を避けながら上空へ抜ける必要があるため、離陸直後は障害物センサーが反応してしまう場合があります。このため、上空へ出るまでは障害物センサーをオフにし、上空に到達した後にセンサーをオンに切り替えて自動航行を開始します。自動航行が終了したら、下図の一時停止スイッチ(オレンジボタン)を押してから、再度センサーをオフにし、ホームポイントまでは再びマニュアル飛行で誘導します。























{kind=link}